Actuated Structures
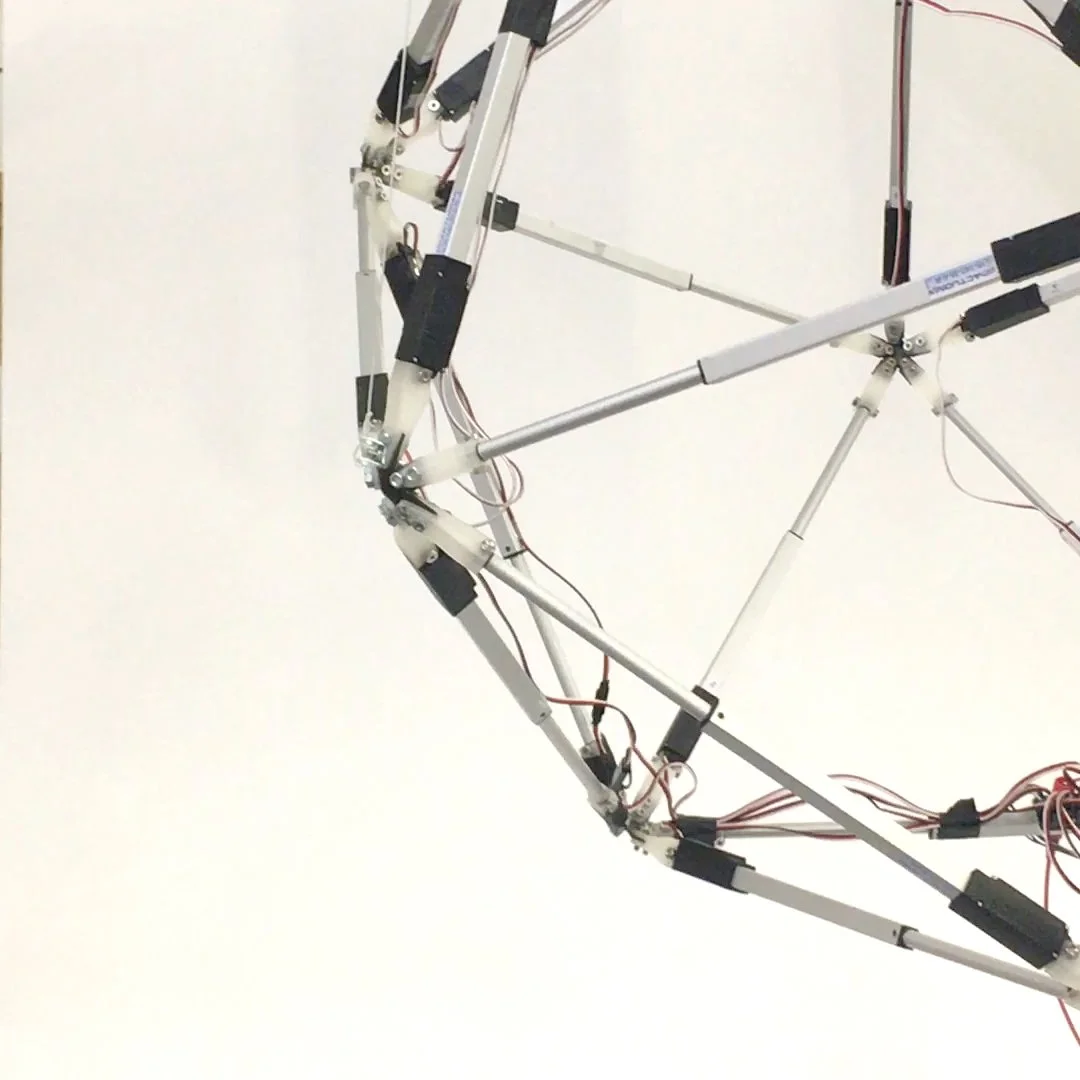
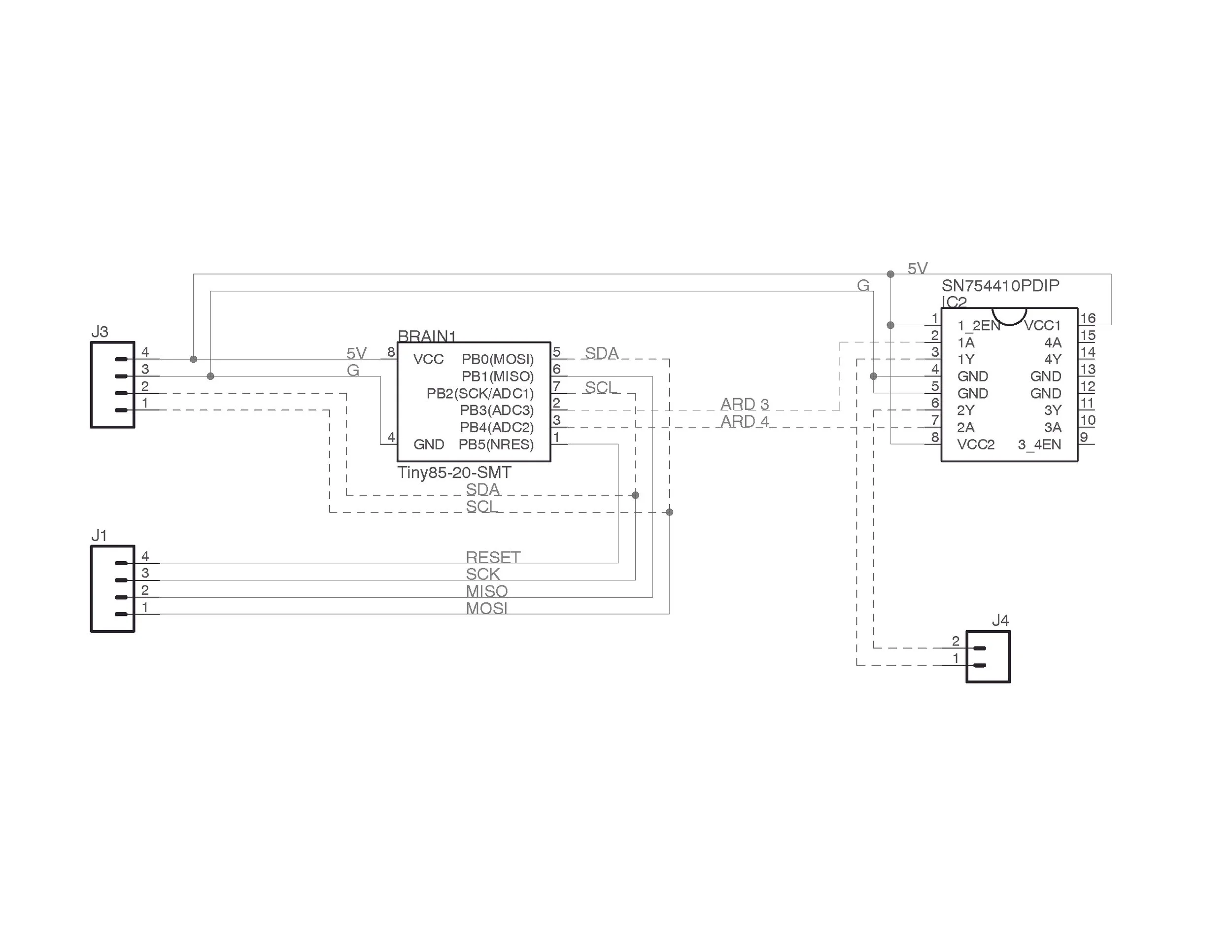
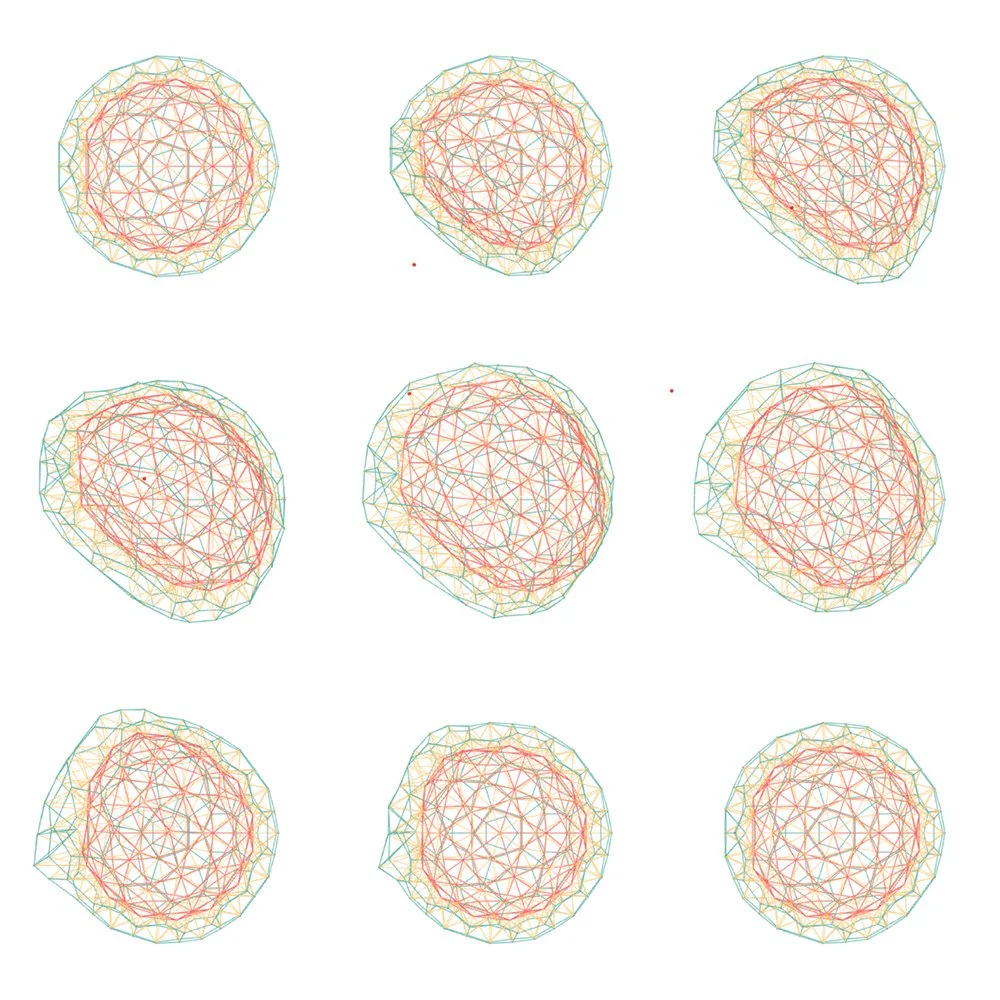
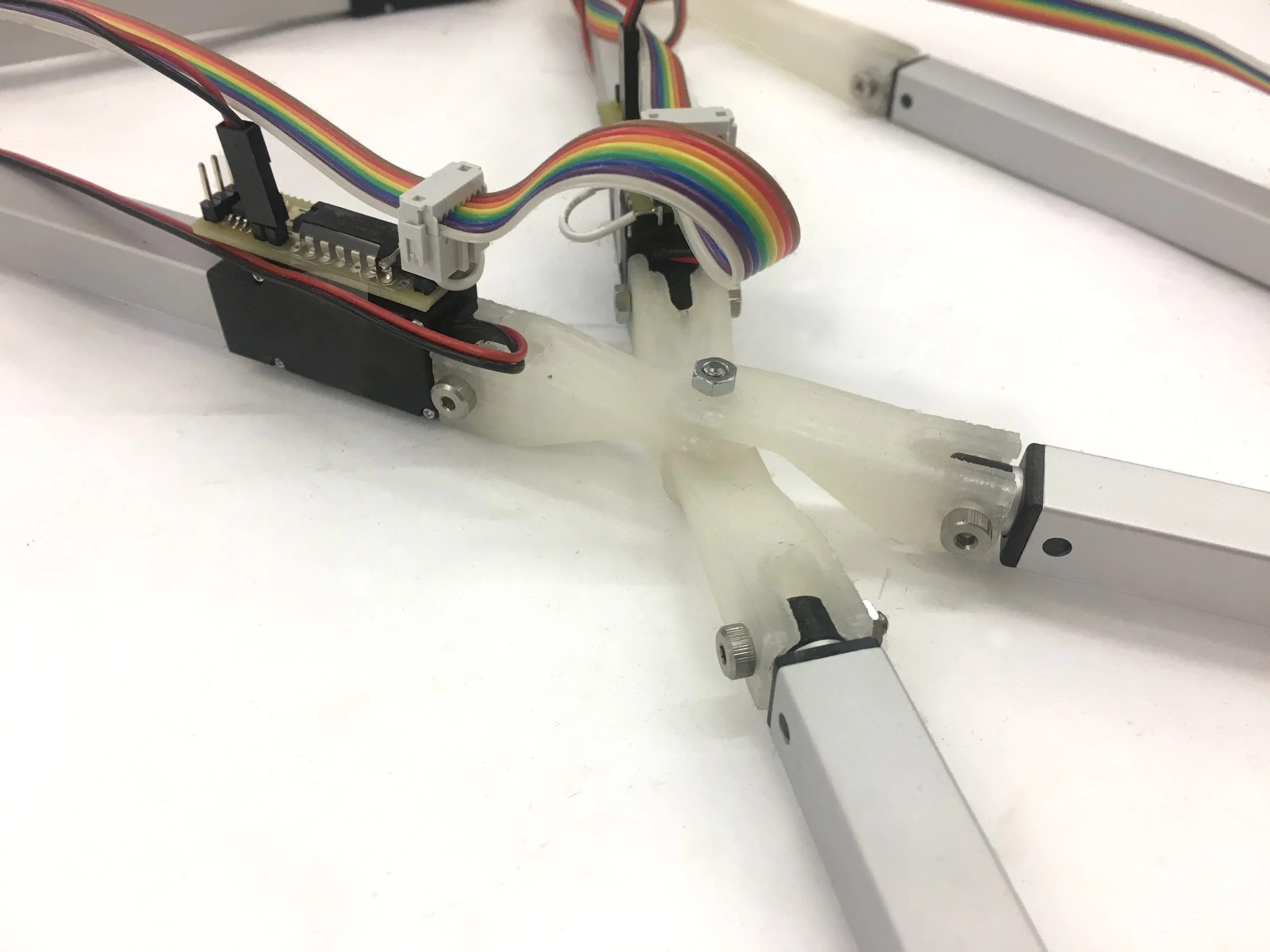
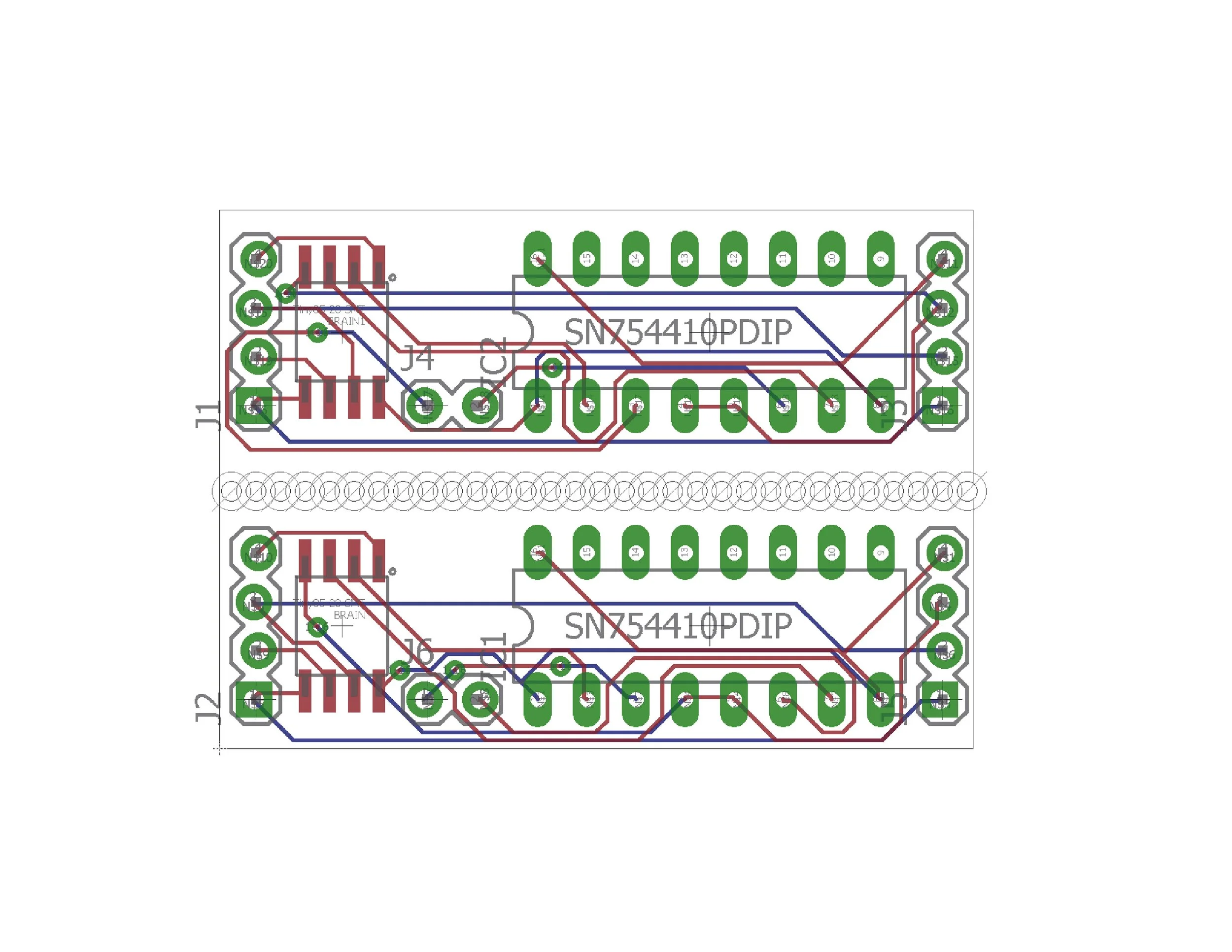
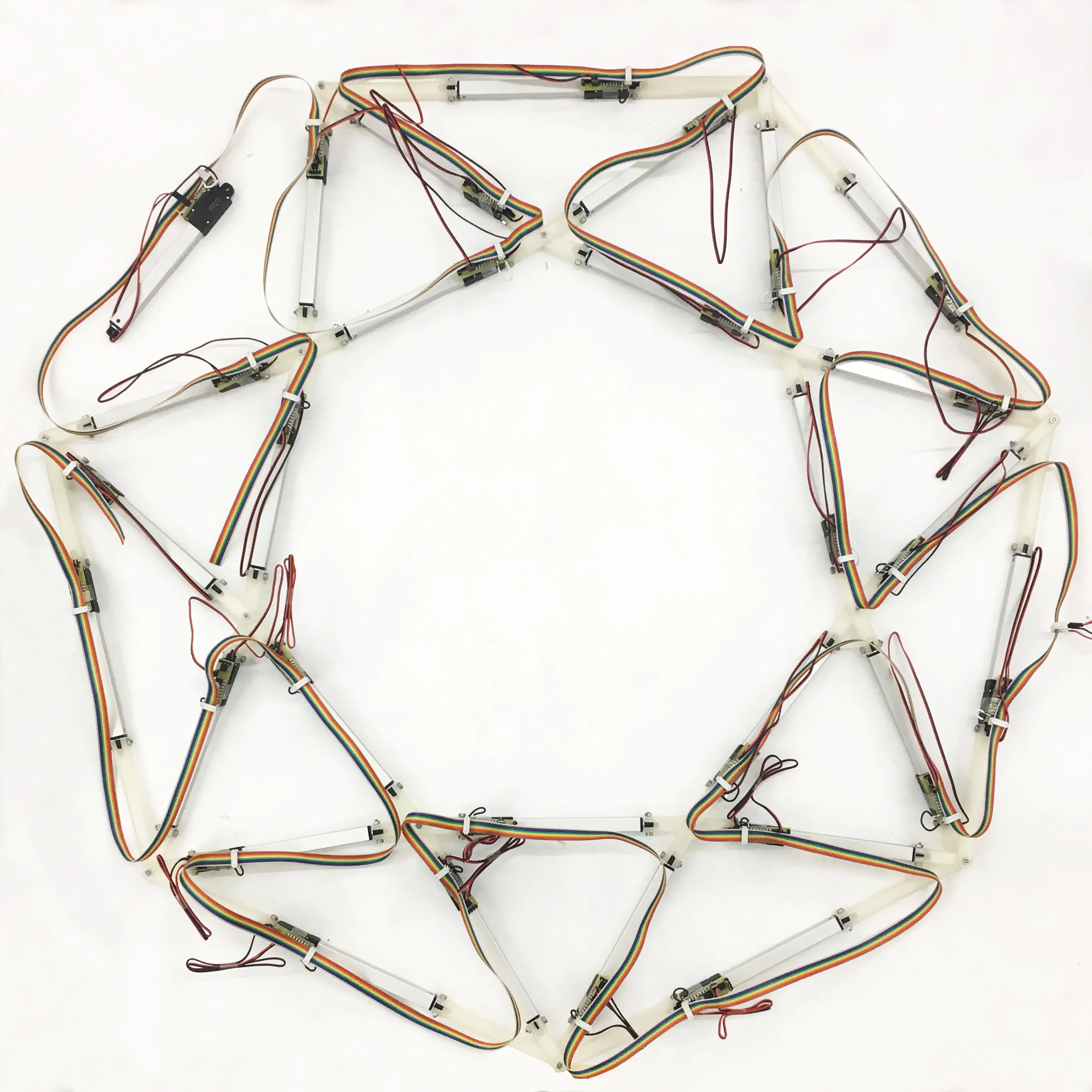
This was fundamental research into robotic controlled structures for CES at Pratt. I developed a control system for linear actuators that could form a morphing truss structure. For the joints I used custom materials and that would self stabilize and act as springs. The actuators were controlled over a custom I2c. The motor drivers were custom PCBs that ran off of an attiny.
Client : Research
Scope : Mech E, Electrical Engineering, Control Theory
Date : 2018
Location : CES Pratt